EV3 vs NXT
We had an opportunity to see and handle the new LEGO MINDSTORM EV3 at the
FIRST World Championships in St. Louis. We didn't not have a lot of time to
evaluate the EV3. These comments are just initial impressions from FLL and FTC
team members, who have been working with the NXT for 6 years.
LEGO has posted a comparison of features for the
EV3 and NXT. The comparison includes lots of new features that we didn't get to test. Mostly, we were quickly checking to see what we thought for our FLL and FTC teams. FTC has announced their competition won't be using
the EV3 in fall 2013.
The EV3 itself and its motors, are larger than the NXT and its motors. The
difference isn't huge, but if you are trying to build a very small robot, the
difference is noticeable. There are two larger drive motors and then a smaller
motor that can be used for attachments. The option to have a smaller motor for
attachments is a good idea.
There are many new sensors, but we didn't get to work with them enough to
form an opinion. The speakers look like they should be much better.
The software uses icons, similar to NXT-G, but they are wired more like
Robolab. They can be automatically connected like NXT-G, or you can specifically
wire them like Robolab.
It is Linux based, and has a different way of selecting which program to run.
Likely that will just take some adjusting for people familiar with the NXT.
EV3 software screen layout seemed better. Rather than blocks down the left
hand side, there were 4-5 categories across the bottom. Within each category
were the actual icons.
There are four motor ports and four sensor ports. The EV3 has a SD slot so
that you can increase the memory. There's a USB hub that we didn't get to
explore. The cable to connect to the computer had different plugs.
We talked with one of the testers. The EV3 has very long turn on and turn off
cycles. The estimate is 30 seconds from when you push the on button, to when it
is ready to start. The NXT takes about 3 seconds.
We're all use to laptops taking a few minutes to boot-up, but it will be
harder for kids who want to push a button and get started. The extra time will
add up during competitions when a team doesn't turn their robot on, or even
worse, it automatically powers down while they are waiting in line.
The turn-off cycle takes about 45 seconds. Again, it's not a huge amount of
time, but compared to about 3 seconds for the NXT, it is a significant change.
We talked to one tester who said that any time the battery was replaced, the
EV3 reset the firmware and all the stored programs were gone. This 'feature' has
significant implications for competition teams who want to have fresh batteries
for each match. Many FLL teams just plug in their robot between matches, they
should be fine.
FTC teams usually replace their batteries frequently at events. This
'feature' is a disaster for those teams. It is reasonably quick, maybe 2
minutes, to remove the NXT from the robot and pop in a new battery just before a
match starts. With the EV3, the team would have to replace the battery (2
minutes), turn it back on (30 seconds), connect to a computer and download their
programs again. It will easily take over 5 minutes, possibly delaying a match.
A staff person from the company that wrote the software 'thought' that if you
waited completely through the shut down cycle (minimum 45 seconds) before
removing the battery, it might not reset the firmware. Unfortunately, we didn't
get to test it.
Some of the issues with the EV3 could be fixed with a software update, but
the size and battery/firmware issues are hardware and there is no easy fix. It would
likely take a hardware upgrade to correct it. At this point, we haven't decided
if we will order one of the early EV3s. It's tempting to wait 6-8 months and see
how they do.
]]>













 ]]>
]]>





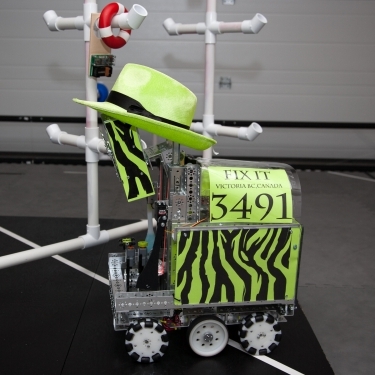
 We were delighted to be nominated for two awards (Think and Innovate) and very excited when the FIX IT team won the Inspire Award.
We were delighted to be nominated for two awards (Think and Innovate) and very excited when the FIX IT team won the Inspire Award.  Central League
Central League
 George scored lots of rings during matches. He could reach the top row and usually scored two rings at a time, except for when we only placed one ring on a peg to quickly place the other ring on a different peg to get more row bonuses. One of our partners drove up our ramp and we scored the lift points!
George scored lots of rings during matches. He could reach the top row and usually scored two rings at a time, except for when we only placed one ring on a peg to quickly place the other ring on a different peg to get more row bonuses. One of our partners drove up our ramp and we scored the lift points! 

 Join Victoria area teams as we learn about this year's robot challenge and research project.
You'll be able to see the mat and mission modules for this year's Robot Game. Students who would like to find out more about FLL, or are looking for a FLL team, are welcome.
Join Victoria area teams as we learn about this year's robot challenge and research project.
You'll be able to see the mat and mission modules for this year's Robot Game. Students who would like to find out more about FLL, or are looking for a FLL team, are welcome. 
